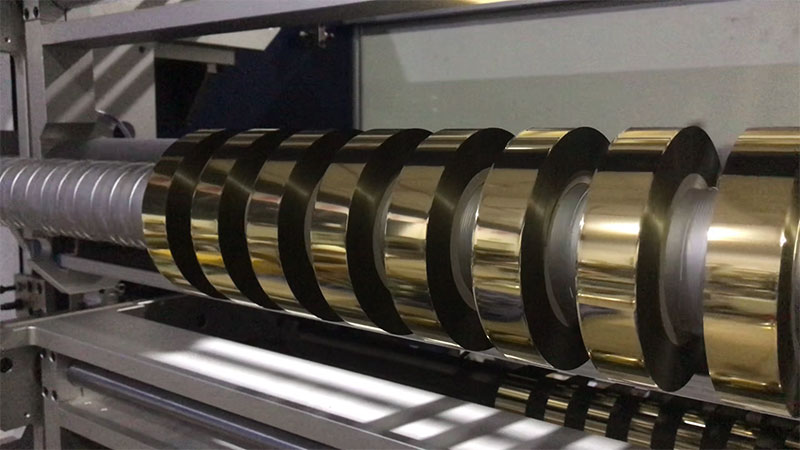
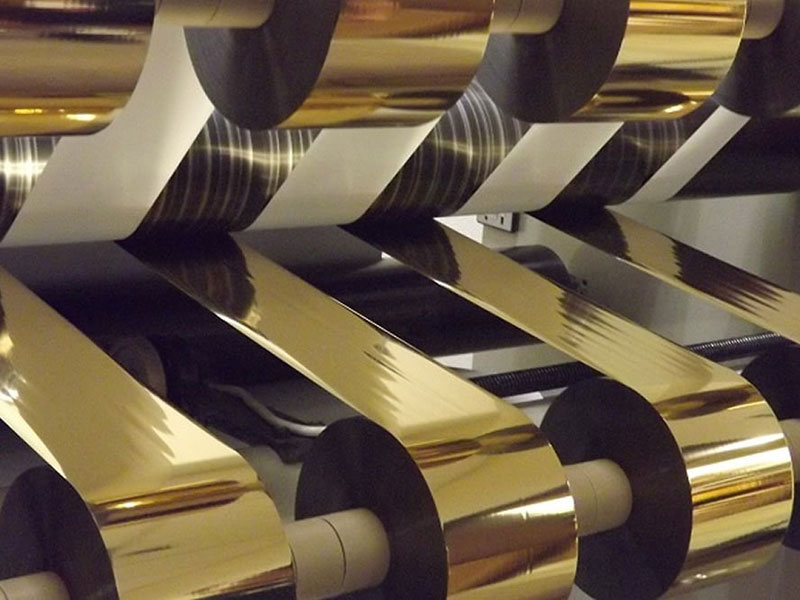
Bei der Weiterverarbeitung hochwertiger Folienmaterialien wie Heißprägefolie, elektrochemischem Aluminium, Laserfolie usw. bestimmt die Wickelqualität der Schneidemaschine direkt die Ausbeute und Effizienz des nachfolgenden Heißprägeprozesses. Wickelabweichungen (auch als „ungleichmäßiges Wickeln“ oder „Turmwalzenwicklung“ bekannt) gehören jedoch zu den häufigsten Problemen in der Branche. Schon ein unregelmäßiger Wickelverlauf oder eine unebene Stirnfläche können zu Materialausfällen, Beschädigungen des Schneidmessers oder sogar Papierbruch führen.
Die erste Reaktion vieler Anwender besteht darin, die Parallelität des Korrektursensors oder der Führungsrolle anzupassen, doch oft bleiben die Probleme dadurch bestehen. Entscheidend für die Sauberkeit der Wickelendfläche ist die dynamische Stabilität der Wickelspannung – also die Reaktionsgeschwindigkeit und Regelgenauigkeit des Spannungsregelkreises. Im Folgenden analysieren wir systematisch, wie sich Wickelabweichungen durch eine „schnelle Stabilisierung des Spannungsregelkreises“ beseitigen lassen – von den physikalischen Mechanismen bis hin zur praktischen Anwendung.

1. Warum führen Spannungsschwankungen zwangsläufig zu Abweichungen?
Die Eigenschaften von Heißprägefolie sind: geringe Dicke (6–20 µm), glatte Oberfläche, geringe Dehnung und geringe Steifigkeit. Beim Schneiden und Wickeln wird die Spule aus einer großen Spule in mehrere schmale Streifen geschnitten, die jeweils einzeln gewickelt werden.
Wenn die Rückzugsspannung periodisch schwankt (z. B. ein Ungleichgewicht von 5 N alle 10 Sekunden ±), tritt folgende Kettenreaktion ein:
1. Elastisches Gleiten:Die Filmschicht erzeugt einen geringen axialen Schlupf auf dem Wickelkern, wobei die Schlupfrichtung jeder Windung zufällig ist, was sich zu einer Fehlausrichtung der Stirnfläche summiert.
2. Ungleichgewicht der seitlichen KräfteSpannungsschwankungen führen zu einer ungleichmäßigen Spannungsverteilung an verschiedenen Punkten in Querrichtung der Membran, wodurch die Membran automatisch zur Seite mit der höheren Spannung „kriecht“.
3. Lose KerneDie innere Schicht entspannt sich nach zu langer Spannung und kann sich nach einer Abweichung der Wicklung nicht mehr selbst reparieren; bei zu hoher Spannung wird die Folie gedehnt und verformt, was ebenfalls zu Verschiebungen zwischen den Schichten führt.
Daher handelt es sich bei der Spannungsregelung nicht um eine einfache „Konstantspannungsregelung“, sondern um ein Servosystem, das schnell und ohne Überschwingen reagieren und Störungen widerstehen muss.
2. Die drei Totpunkte der traditionellen Spannungsregelung
Viele Schneidemaschinen verwenden eine Drehmomentregelung im offenen Regelkreis oder eine PID-Regelung im geschlossenen Regelkreis, wodurch es in den folgenden Situationen sehr leicht zu einem Kontrollverlust kommen kann:
• Schneller Wechsel des Walzendurchmessers:Beim Übergang von leerer zu voller Walze kann das Verhältnis von Walzengröße zu Durchmesser bis zu 5:1 erreichen, und das Trägheitsmoment ändert sich drastisch. Bei fixierten PID-Parametern treten bei kleinen Walzen starke Vibrationen auf, während die Reaktion bei großen Walzen träge ist.
• Beschleunigungs- und VerzögerungsprozessBeim Anfahren und Anhalten sowie beim Anheben der Spule überlagert sich die Trägheitskraft der Seilspannung, was zu einem kurzzeitigen Spannungsanstieg und einem sofortigen „Lagensprung“ beim Zurückspulen führt.
• Ungleichmäßige Materialfugen oder -dickenBeim Heißprägen von Folien treten häufig Schwankungen in der Dicke des Papiers oder der Beschichtung auf, die eine sprunghafte Störung des geschlossenen Spannungsregelkreises darstellen. Ein herkömmlicher PID-Regler benötigt 2–3 Schwankungszyklen zur Wiederherstellung, und während dieser Schwankungen treten Abweichungen auf.

3. Die „dreistufige Regelungsstrategie“ zur schnellen Stabilisierung
Um Abweichungen zu beseitigen, muss die Nachstellzeit des Spannungsregelkreises auf ein durch die Materialeigenschaften vorgegebenes Maß reduziert werden (typischerweise ≤ 0,5 Sekunden ohne Überschwingen). So geht's:
Schritt 1: Einführung einer dualen geschlossenen Regelschleife mit „Geschwindigkeit + Strom“.
• Äußerer Ring (Speed-Ring): wird vom Encoder oder linearen Geschwindigkeitssensor vorgegeben, um ein Kriechen bei niedriger Geschwindigkeit im reinen Drehmomentmodus zu vermeiden.
• Innerer Ring (Stromring/Drehmomentring)Die Hochgeschwindigkeitsreaktion (Millisekunden) des Servoantriebs regelt direkt die Motorleistung.
• KernpunktDer Wickelmotor muss im Drehmomentregelungsmodus arbeiten, wobei das Referenzdrehmoment in Echtzeit anhand des Spannungssollwerts berechnet wird. Zusätzlich wird eine Drehzahlbegrenzung als Sicherheitsvorkehrung eingeführt.
Schritt 2: Die dynamische Vorsteuerung kompensiert den Spulendurchmesser und die Trägheit.
• Berechnung des aktuellen Spulendurchmessers in Echtzeit (mittels Verhältnis von Lineargeschwindigkeit zu Winkelgeschwindigkeit oder Ultraschallsensor).
• Echtzeit-Aktualisierung zweier Parameter basierend auf dem Walzendurchmesser:
◦ Drehmomentkompensationskoeffizient: T = F × (D/2), wobei F die eingestellte Spannung und D der Spulendurchmesser in Echtzeit ist.
◦ Trägheitsvorsteuerung: Beim Beschleunigen oder Verzögern wird eine zusätzliche Drehmomentkomponente ΔT = J × α überlagert (J ist das Trägheitsmoment der Stromspule, α ist die Winkelbeschleunigung).
• Auf diese Weise kann die tatsächliche Spannungsschwankung auch bei voller Geschwindigkeit und sowohl beim Auf- als auch beim Abfahren auf ±3 % genau kontrolliert werden.
Schritt 3: Adaptive PID-Regelung + Unterdrückung niederfrequenter Störungen
• Für die üblichen Spannungsschwankungen von 0,5 bis 5 Hz bei Heißprägefolien (wie z. B. Exzentrizität der Antriebswalzen, schlechte dynamische Balance der Luftausdehnungsachse) ist ein Bandpassfilter oder Kerbfilter in den PID-Regler integriert.
• Fuzzy-PID-Regler oder Modellreferenzanpassung: Die Skalenverstärkung Kp und die Integrationszeit Ti werden automatisch angepasst, sobald die Volumenänderung einen Schwellenwert überschreitet. Beispielsweise wird Kp bei kleinen Volumina verringert, um Stoßänderungen zu vermeiden, und bei großen Volumina erhöht, um die Störfestigkeit zu verbessern.
• Die Messdaten zeigen, dass die optimierte Regelungszeit im geschlossenen Regelkreis von 2 bis 3 Sekunden auf weniger als 0,3 Sekunden der herkömmlichen Regelung verkürzt werden kann, und es gibt kein Überschwingen.

Viertens die vier „unsichtbaren Killer“ bei der Umsetzung des Projekts
Selbst wenn der theoretische Algorithmus perfekt ist, können vor Ort Abweichungen auftreten. Folgende Details dürfen nicht außer Acht gelassen werden:
1. Einbauposition des SpannungssensorsDie Position muss nahe an der letzten Führungsrolle vor dem Wickeln liegen, und das Rollenlagerspiel darf ≤ 0,01 mm nicht überschreiten. Die Sensorsignalleitung sollte weit entfernt von der Stromleitung des Frequenzumrichters verlaufen.
2. Aufblasdruck der SpulenwelleBei 3-Zoll- oder 6-Zoll-Kernen muss der Luftdruck gleichmäßig und stabil sein (ein Regler mit geschlossenem Regelkreis wird empfohlen). Ist der Druck zu gering, rutscht die innere Schicht ab; ist er zu hoch, verformt sich der Papierkern.
3. Unabhängige, schwimmende Walzen für jeden schmalen Streifen nach dem SchneidenBei extrem schmalen Bändern mit einer Breite von weniger als 20 mm wird empfohlen, an jeder Wickelstation Mikro-Schwimmwalzen anzubringen, um eine mechanische Dämpfung mittels Schwerkraft oder reibungsarmen Zylindern zu gewährleisten.
4. Timing der Kantenkorrektur und des SpannungsregelkreisesDie Korrekturmaßnahme verändert vorübergehend die Länge des Membranwegs und beeinflusst dadurch die Spannung. Dies muss in der SPS so eingestellt werden, dass der Spannungsregler im Moment der Korrekturmaßnahme den Integralanteil kurzzeitig einfriert und nach Abschluss der Korrektur wieder aufnimmt.
5. Wirkungsnachweis: von „mit bloßem Auge sichtbar“ zu „messbaren Daten“
Die optimierte Wicklungsabweichung kann quantitativ bewertet werden:
• Endflächenfehlausrichtung: ≤±0,5 mm (normaler Betriebszustand) / ≤±1,0 mm (Beschleunigungs- und Verzögerungsbetriebszustand).
• Spannungsschwankungsspitze:≤ ±5% des Sollwerts.
• Anpassungszeit: ≤0,5 Sekunden (vom Zeitpunkt des Auftretens der Störung bis zur Rückkehr zum stationären Zustand).
Es wird empfohlen, dass Anwender im laufenden Betrieb einen „Stufentest“ durchführen: Ändern Sie den Sollwert der Aufwickelgeschwindigkeit künstlich und schnell um ±10 %, zeichnen Sie die Kennlinie des Spannungssensors mit einem Hochgeschwindigkeits-Datensammler auf und beobachten Sie das Überschwingen und die Anzahl der Schwingungen. Konvergiert die Kurvenform innerhalb einer Periode, ist die Regelung erfolgreich.
Epilog
Die Wickelabweichung der Heißprägefolienschneidemaschine ist im Wesentlichen kein Problem der „Korrektur“, sondern ein Problem der „Spannung“. Nur wenn der Spannungsregelkreis drei wesentliche Eigenschaften aufweist – schnelles Ansprechverhalten, adaptive Anpassung des Spulendurchmessers und Unterdrückung mechanischer Störungen –, lässt sich das Schlangenlinienwickeln grundlegend beseitigen. Für Maschinenhersteller bedeutet dies nicht nur den Austausch eines PID-Reglers, sondern auch die systematische Optimierung von Servoantrieb, mechanischer Steifigkeit und Sensorgenauigkeit. Wenn Ihre Wickelkopffläche makellos glatt ist, haben Sie die Grundlagen der Spannungsregelung verstanden.


 Kaltfolienschneider
Kaltfolienschneider Kartendruckband-Aufwickler
Kartendruckband-Aufwickler Kartendruckbandschneider
Kartendruckbandschneider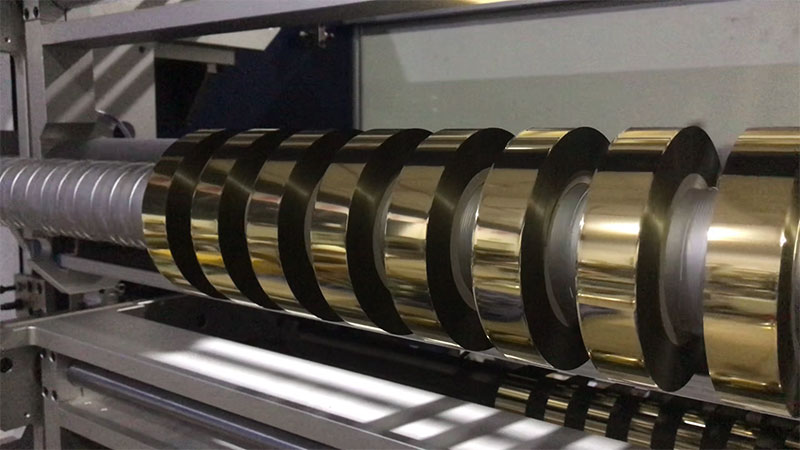 Holographischer Folienschneider
Holographischer Folienschneider Heißprägefolienschneider (RSDS7H) 1350
Heißprägefolienschneider (RSDS7H) 1350 Heißprägefolienschneider RSDS7H 1350 PLUS
Heißprägefolienschneider RSDS7H 1350 PLUS Heißprägefolien-Schneidemaschine
Heißprägefolien-Schneidemaschine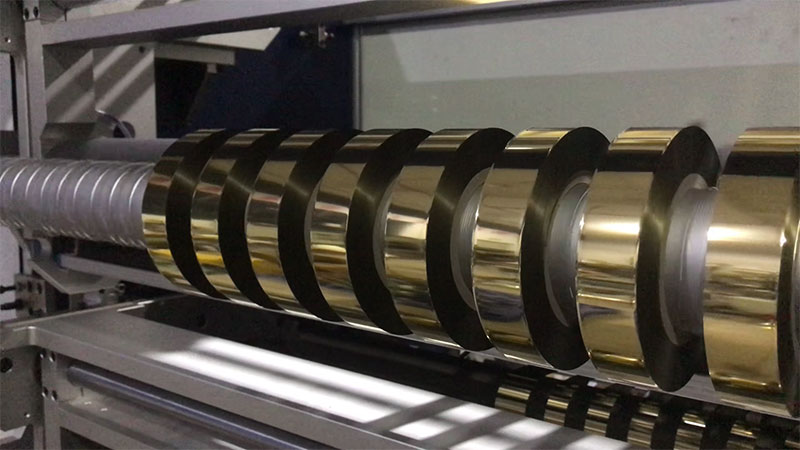 Digital Enhancement Folienschneider
Digital Enhancement Folienschneider





